Skip to content
Products
Gomboc Designer
Gomboc Community
Gomboc Player
Blogger
Features & Prices
About us
News
FAQ
Contact
Products
Gomboc Designer
Gomboc Community
Gomboc Player
Blogger
Features & Prices
About us
News
FAQ
Contact
Masses
Hierarchial system of masses
Computation of inertia matrices from sub-components
Rigid-body block integrates motion resulting from 6-DOF forces
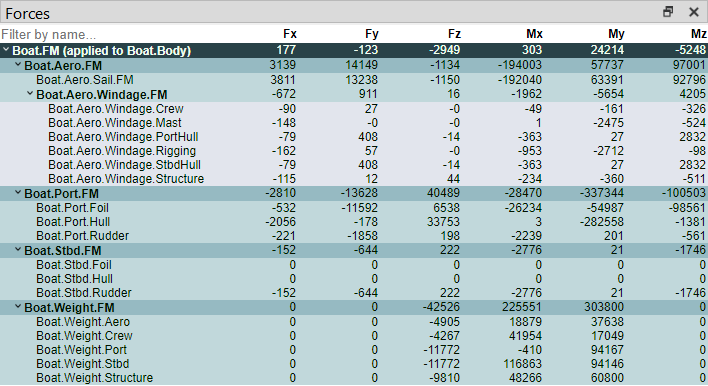
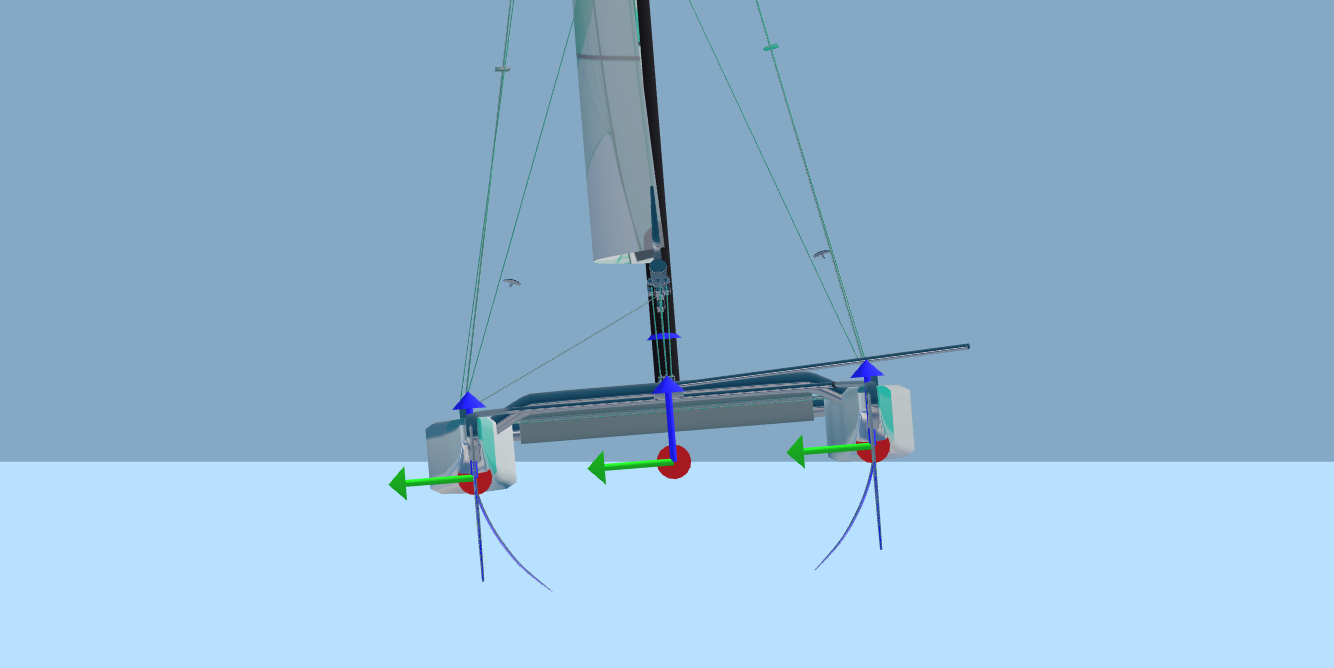
Forces
Hierarchical force specification and summation
Specification and output of forces and moments in any frame
Custom force generating blocks to model non-standard components
Frames
Hierarchical system of reference frames
Model components defined in any frame
Euler-angle definition for rigid-body angles
Specification and output of velocities and angular velocities in any frame
Hierarchical system of masses
Hierarchical force summation
Hierarchichal system of reference frames - hulls frame
Hierarchichal system of reference frames - aerodynamic frame
WIND & WAVES
INPUT & OUTPUT